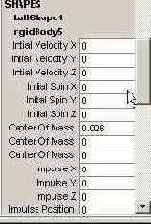
Рисунок 13.1. Настройка параметров активного твердого тела
Static Friction (Трение покоя). Количество энергии, необходимое, чтобы заставить двигаться объект, расположенный на некоторой поверхности. В реальности, чтобы заставить объект двигаться вдоль поверхности, требуется большее количество энергии, чем на поддержание его движения с постоянной скоростью. Это связано с тем, что между поверхностями тел возникают силы сцепления. Чем более гладкие поверхности необходимо заставить перемещаться друг относительно друга, тем больше трение покоя. Например, намного проще заставить деревянный куб перемещаться по бетонному полу, чем вызвать движение резинового куба по стальной поверхности.
Dynamic Friction (Динамическое трение). Количество энергии, необходимое для поддержания движения объекта вдоль некоторой поверхности. Необходимо помнить, что каждая поверхность имеет свой коэффициент трения и что поверхности взаимодействуют друг с другом. Например, для создания эффекта скользкой поверхности необходимо уменьшить величины трения покоя и динамического трения между поверхностью и объектами, которые приходят с ней в соприкосновение.
Stand In (Заместитель). Обычно при имитации динамики во всех кадрах каждый полигон поверхности проверяется на предмет соприкосновения с поверхностью активного или пассивного тела. Если объекты собраны в группу или используется очень сложная модель, вычисления могут замедлиться настолько, что для их завершения понадобится несколько часов или даже дней. Но, указав соответствующее значение параметра Stand In (Заместитель), можно заменить реальную поверхность упрощенным объектом, что позволит ускорить процесс вычислений. В качестве заменителей предлагаются сфера и куб. Для плоских объектов обычно используется куб, который замещает объект его габаритным контейнером. Соответственно, для объектов сферической формы в качестве заместителя лучше брать сферу. Имейте в виду, что перемещения объектов зависят от вида заместителя, так что если при моделировании столкновений вы для яйца выберете в качестве заместителя куб, то возникнет впечатление, что перед яйцом находится прямоугольная пластина.
Совет
СОВЕТ
При работе со сложными объектами, форму которых невозможно предста-вить в виде куба или сферы, также существует возможность ускорить вычисления. В этом случае создаются невизуализируемые аппроксимирующие объекты упрощенной формы. Затем исходный объект необходимо сделать родительским по отношению к аппроксимирующему, чтобы их перемещения происходили согласованно.
При имитации динамики прежде всего необходимо разделить объекты сцены на активные и пассивные. Это делается с помощью команд Create Active Rigid Body (Создать активное твердое тело) и Create Passive Rigid Body (Создать пассивное твердое тело) в меню Soft/Rigid Bodies (Упругие/Твердые тела). После этого можно задать параметры тела в окне каналов. Затем необходимо определить поля (fields), под действием которых находится объект, и указать, ограничивает ли что-нибудь его движение.